
بحث بعنوان Dynamic Performance of a SCARA Robot Manipulator
 (لا توجد تقييمات)
(لا توجد تقييمات)بحث بعنوان
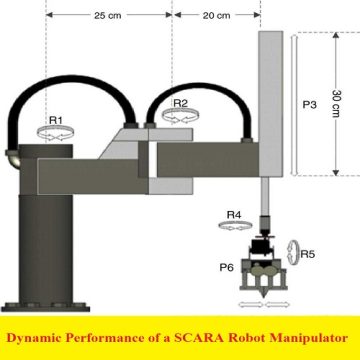
Dynamic Performance of a SCARA Robot Manipulator
With Uncertainty Using Polynomial Chaos Theory
Philip Voglewede, Anton H. C. Smith, and Antonello Monti
Abstract—This short paper outlines how polynomial chaos theory (PCT)
can be utilized for manipulator dynamic analysis and controller design in
a 4-DOF selective compliance assembly robot-arm-type manipulator with
variation in both the link masses and payload. It includes a simple linear
control algorithm into the formulation to show the capability of the PCT
framework.
Index Terms – Monte Carlo methods, polynomials, robot dynamics, uncertainty.
CONCLUSION
This paper has shown in detail how to use PCT to analyze the
dynamic response of an open-loop mechanism by applying it to a
SCARA robot manipulator. Through this particular example, several
items were found.
1) PCT on the SCARA robot is feasible as long as the number of
unknowns are small. Automating the process further aiding in
speeding up the process. However, this even has its limits as
even the automated process is still cumbersome.
2) Using PCT on robotic applications requires a judicious choice of
states and formulation of the problem to make sure that nonlinearities are not introduced into the equations.
3) PCT on a SCARA robot gives consistent results to a large MC
for a simple one-term expansion. This was true even using a
standard approximation of the trigonometric identities.
4) PCT exhibits “antinodes” (positions in the output where the
variation decreases significantly), even in this robotics example.
However, this was not noted on all joints.
5) PCT can be utilized with feedback control. However, integral
and nonlinear control poses some interesting problems that have
yet to be solved.
6) PCT has no problem with both underdamped and overdamped
type responses.
Additionally, this example also corroborates several of the known
advantages regarding the use of PCT. Specifically, PCT is more efficient from a simulation time standpoint, allows dynamic changing of
parameters during the simulation, and yields a richer result that can be
utilized in other applications like controller design.
كلمة سر فك الضغط : books-world.net
The Unzip Password : books-world.net
تعليقات